|
基于阴影手和仿人机器人的材料识别程序,以验证触觉描述子的性能和鲁棒性。采用外侧、内侧、环形和联合运动滑动动作收集触觉数据。尽管任何探测都需要1秒以上的时间(中间滑动和环形滑动分别为2秒和10秒)[23]。与指示动作不同,Strese等人。使装置可以任意探索表面,以保证材料数据库的类内变化,即没有特定的速度、力或运动模式。然而,自由探索影响了分类的准确性,69种材料的最佳准确率在74%左右[19]。为了实现主动目标识别,Tanaka等人。按顺序执行信息操作以收集触觉数据。通过教学轨迹和反馈触觉数据生成新的探索轨迹,自动采集不同物体的触觉数据[24]。考虑到准确性和效率,我们选择了一个简单的侧向滑动动作作为EP。在这里,为了节省一秒钟的速度和速度,我们使用了一个互动式传感器来提高滑动速度和速度。
在采集触觉数据后,人体动态触觉感知也是特征提取的一个很好的启发。在人体皮肤中,不同的机械感受器在探索的过程中感受到不同频率和特征的刺激。例如,Pacinian微粒检测到高频振动,这取决于接触表面的纹理,Ruffini微粒感知持续的向下压力,压力分布指示接触状态,这与材料柔度有关[25]。为了模拟人类SA-I、FA-I和FA-II通道,Romano等人。处理来自压力传感器阵列和加速计的测量值。他们将传感器阵列和相应的高频分量的读数相加为SA-I和FA-I通道的信号,并将加速度计的高通滤波三维加速度矢量的大小作为FA-II通道的信号[26,27]。虽然这种方法没有利用高密度触觉传感器的能力来感知接触条件,但在他们的研究中,汇总读数的效果很好,这对柔顺性感知非常重要。而不是压力数据,休斯等人。使用单个麦克风收集数据。数据通过信号处理方法进行处理,如快速傅立叶变换,以模拟太平洋小体的任务[14]。然而,他们的传感器网络密度很低,在2.8平方米的区域内只有10个传感节点。这个密度远低于人类手上的太平洋小体和其他机械感受器的密度[28,29],这使得15种纹理的精确度达到71%。由于动态触觉感知对于人类识别材料非常重要[9,30],本文从数据中抽象出顺应性和纹理相关的时间序列,因为柔度和纹理对于动态触觉感知具有高度可识别性。然后,基于小波变换和统计分析,从序列中提取出与人体皮肤机械感受器产生的信号相似的特征。
论文组织如下。第三部分详细介绍了我们的方法,包括实验装置、特征提取和分类。第四部分给出了实验结果,证明了该方法的有效性。第五部分总结了该方法及其贡献。
三。方法论
3.1条。材料识别方法
本文提出的方法包括两个步骤。首先,机器人进行短时滑动动作,利用高密度、大尺寸的触觉传感器采集1秒滑动动作的触觉图像。其次,采用机器学习算法对触觉数据进行处理,包括特征提取和分类器训练。在特征提取过程中,通过计算三个与材料相关的时间序列来提取触觉图像。然后,基于统计和小波变换,从序列中提取出11个仿生触觉特征。最后利用特征向量训练七个分类器,选出最准确的分类器进行属性和材料识别。我们的方法的过程如图1所示。
Applsci 09 02537 g001 550图1。材料识别方法的过程。
3.2条。实验装置
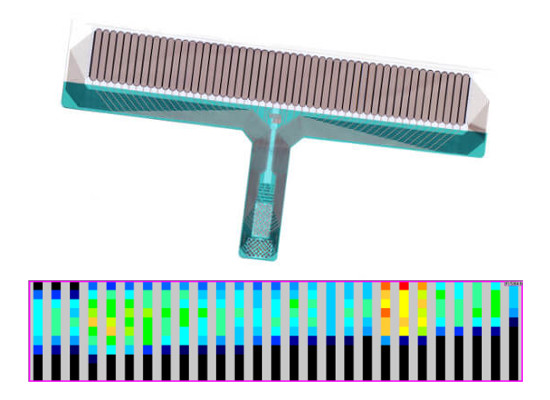
触觉传感器:采用一个触觉传感器(压力映射传感器5101,Tekscan,South Boston,MA,USA)来获取触觉数据,如图2a所示。该传感器由两个薄的、柔性的聚酯板组成,其具有 |